质点运动的两类基本情况
如果质点受到的力仅与时间相关, 即$\vec{F}(t)$, 则有
$$
\begin{align}
\vec{F} &= m \frac{\mathrm{d}\vec{v}}{\mathrm{d}t} \
\vec{F}\mathrm{d}t &= \mathrm{d}\vec{v}
\end{align}
$$
也就是动量定理.
如果质点受到的力仅与位置相关, 即$\vec{F}(\vec{r})$, 则有
$$
\begin{align}
\vec{F} &= m \frac{\mathrm{d}\vec{v}}{\mathrm{d}t} \
\vec{F} \cdot \mathrm{d}\vec{r} &= m \frac{\mathrm{d}\vec{v}}{\mathrm{d}t} \cdot \mathrm{d}\vec{r} = m \vec{v}\mathrm{d}\vec{v}
\end{align}
$$
也就是动能定理
势与场
在分析与万有引力相关的问题之中, 我们可以发现, 作用在一个物体上的万有引力可以表达为物体的质量$m$与一个位置相关的矢量$\vec{C}$的乘积, 即
$$
\vec{F} = m \cdot \vec{C}
$$
$\vec{C}$被称之为场. 对于势能可以进行同样的定义, 即
$$
U = - \int \vec{F} \cdot \mathrm{d}s = - m \int \vec{C} \cdot \mathrm{d}s = m \Psi
$$
其中$\Psi$称之为势函数. $\Psi$是一个三元函数, 在空间的每个坐标上都具有一个分量. 通过对$\Psi$的微分, 可以求解对应的场, 即
$$
\vec{C} = -\frac{\partial \Psi}{\partial x} \vec{i} - \frac{\partial \Psi}{\partial y} \vec{j} - \frac{\partial \Psi}{\partial z} \vec{k}
$$
上述写法较为复杂, 可使用梯度算子$\nabla$代替上述微分操作, 即
$$
\vec{C} = -\nabla \Psi
$$
同理可得, 在场中任意位置收到的力为
$$
\vec{F} = -\nabla U
$$
运动积分
运动积分是系统运动过程中的不变量, 常见的运动积分有:
动量守恒
$$
\vec{p}(\vec{v}) = m\vec{v} = \vec{C}
$$
对应的积分形式为
$$
\vec{p_2} - \vec{p_1} = \int^{t_2}_{t1} \vec{F} \mathrm{d}t
$$
因此如果$\vec{F} = 0$, 则动量守恒. 但这一约束太强, 通常无法满足, 因此可以使用分量形式, 即动量在某一个固定方向守恒.
动量矩(角动量)守恒
力矩的定义为:
$$
\vec{M} = \vec{r} \times \vec{F}
$$
对应的动量矩的定义为:
$$
\vec{J}(\vec{r}, \vec{v}) = \vec{r} \times m\vec{v} = \vec{C}
$$
根据牛顿第二定律有
$$
\vec{M} = \vec{r} \times \vec{F} = \vec{r} \times m \frac{\mathrm{d}\vec{v}}{\mathrm{d}t} + \frac{\mathrm{d}\vec{r}}{\mathrm{d}t} \times m \vec{v} = \frac{\mathrm{d}}{\mathrm{d}t}(\vec{r} \times m \vec{v})
$$
即
$$
\vec{M} = \frac{\mathrm{d}\vec{J}}{\mathrm{d}t}
$$
类比动量的表达形式, 可以得到如果$\vec{M} = 0$, 则动量矩守恒.
在平面极坐标系中, 如果$F_\theta = 0$(即有心力), 则显然有
$$
\vec{M} = \vec{r} \times \vec{F} = 0
$$
此时动量矩守恒, 即
$$
\vec{J} = \vec{r} \times \vec{p} = r\vec{e_r} \times m(\dot{r}\vec{e_r} + r\dot{\theta}\vec{e_\theta}) = mr^2\dot{\theta}(\vec{e_r} \times \vec{e_\theta}) = mr^2\dot{\theta}\vec{k}
$$
机械能守恒
$$
E(\vec{r}, \vec{v}) = T + V = C
$$
从开普勒三定律推导万有引力定律
根据开普勒三定律, 可以得到如下的一些结论:
开普勒第一定律: 行星轨道是一个椭圆, 即
$$
r = \frac{p}{1 + e \cos{\theta}}
$$
开普勒第二定律: 行星的掠面速率不变, 即
$$
\dot{A} = \frac{1}{2}r^2\dot{\theta} = \frac{1}{2}C_1
$$
其中C1是一个与行星相关的常数
开普勒第三定律: 半长轴的三次方与周期的平方是固定值关, 即
$$
\frac{T^2}{a^3} = C_2
$$
其中C2是一个与行星无关的尝试
基于牛顿第一定律, 行星轨道为椭圆则说明行星必然受到力的作用(否则应该保持匀速直线运动). 基于开普勒第二定律, 可分析出该力必须是有心力.
基于牛顿第二定理, 在极坐标表示下, 可得到径向力表达式为
$$
F_r = m(\ddot{r} - r\dot{\theta}^2) = -\frac{mC_1^2}{p} \frac{1}{r^2}
$$
将r使用椭圆的极坐标表示带入即可获得对应的表达式. 基于上述表达式可知, 该力是一种引力且遵循平方反比
根据开普勒第二定律, 有
$$
T = \frac{A}{\dot{A}} = \frac{\pi ab}{1/2 C_1} = \frac{2\pi ab}{C_1}
$$
因此有
$$
\frac{T^2}{a^3} = \frac{4 \pi^2 a^2b^2}{C_1^2 a^3} = \frac{4 \pi^2 b^2}{C_1^2 a} = \frac{4 \pi^2 p}{C_1^2} = C_2
$$
则关于$F_r$的公式中有
$$
\frac{C_1^2}{p} = \frac{4\pi^2}{C_2} = C_3
$$
由于$C_2$与行星无关, 因此可知$C_3$与行星无关, 即
$$
\vec{F}(r) = - mC_3 \frac{1}{r^2} \vec{e_r}
$$
基于牛顿第三定律, 对太阳进行相同的分析可得
$$
\vec{F’}(r) = - mC_3’ \frac{1}{r^2} \vec{e_r}
$$
并且两个力大小相等, 方向相反, 联立公式可得
$$
\frac{C_3}{M} = \frac{C_3’}{m} = \cdots = G
$$
狭义相对论
牛顿认为物体的运动规律可以表述为
$$
F = \frac{\mathrm{d}(mv)}{\mathrm{d}t}
$$
并且$m$是一个不随其他参数变化的常量. 但这一假设并不正确, 在经过爱因斯坦的修正后, 质量具有如下的关系
$$
m = \frac{m_0}{\sqrt{1-\frac{v^2}{c^2}}}
$$
其中$m_0$是物体不运动是的质量, 也称为静止质量.
谐振子
常系数线性微分方程包含几项之和, 每一项都是因变量对自变量的微商乘以某个常数, 例如
$$
a_n \frac{\mathrm{d}^n x}{\mathrm{d} t^n} + a_{n-1} \frac{\mathrm{d}^{n-1} x}{\mathrm{d} t^{n-1}} + \cdots + a_1 \frac{\mathrm{d} x}{\mathrm{d} t} + a_0 x= f(t)
$$
如果$y_0$和$y_1$是方程的解, 那么两个解的任何线性组合也是方程的解. 这也是”线性”的体现.
对于一个受到弹簧限制的物体, 其受到的弹力与弹簧的伸长量正比, 可以得到方程
$$
m \frac{\mathrm{d}^2 x}{d t^2} = -k x
$$
对于上述微分方程, 显然有
$$
x = a \cos(\omega t + \Delta)
$$
满足要求, 仅需要根据实际情况确认这些系数的取值. 其中$a$称为振幅, $\omega$称为角频率, $\Delta$称为相位.
基于以上表达式, 可求解该系统的总能量. 其中势能
$$
U = \frac{1}{2} kx^2 = \frac{1}{2}ka^2\cos^2(\omega t + \Delta)
$$
速度为
$$
v = -\omega a \sin(\omega t + \Delta)
$$
动能为
$$
T= \frac{1}{2}mv^2 = \frac{1}{2}m\omega^2a^2\sin^2(\omega t + \Delta)
$$
注意到$k=m\omega^2$ 则总能量有
$$
T + U = \frac{1}{2}ka^2\cos^2(\omega t + \Delta) + \frac{1}{2}m\omega^2a^2\sin^2(\omega t + \Delta) = \frac{1}{2}m\omega^2a^2
$$
因此能量与振幅的平方有关.
受迫运动
对于有外力的谐振子, 方程为
$$
m \frac{\mathrm{d}^2 x}{d t^2} = -k x + F(t)
$$
首先分析一种简单情况, 即 $F = F_0 \cos\omega t$, 即外力也是一个振动的力. 设解为
$$
x = C \cos \omega t
$$
带入可解得
$$
C = \frac{F_0}{m(\omega_0^2 - \omega^2)}
$$
其中$\omega_0$是没有外力时的频率. 当$\omega$远小于$\omega_0$时, 力和位移就在同一方向上. 如果频率很高, 那么分母变大, 振幅就比较小. 此外还可以注意到, 如果频率相等, 则振幅会变成无限大. 这是因为没有考虑实际的摩擦等情况的理想值.
光学: 最短时间原理
如果$\theta_i$表示空气中的角度, $\theta_r$表示水中的角度, 则有
$$
\sin \theta_i = n \sin \theta_r
$$
对于水, 常数$n$约等于1.33
以上规则可以用最短时间原理推导. 由于光始终走耗时最短的路径, 因此可以假设在该路径附近的一个领域内对路径进行微小的改变时, 总耗时不变(也就是一阶导数为零)
可以相当于入射点做一个微小的偏移, 然后比较空气中减少的路径长度和水中增加的路径长度, 两者分别除以相应的光速(水中的光速比空气中慢)后, 结果应该相等. 由此可以结合几何图形导出上述的正弦函数关系.
球面的焦距
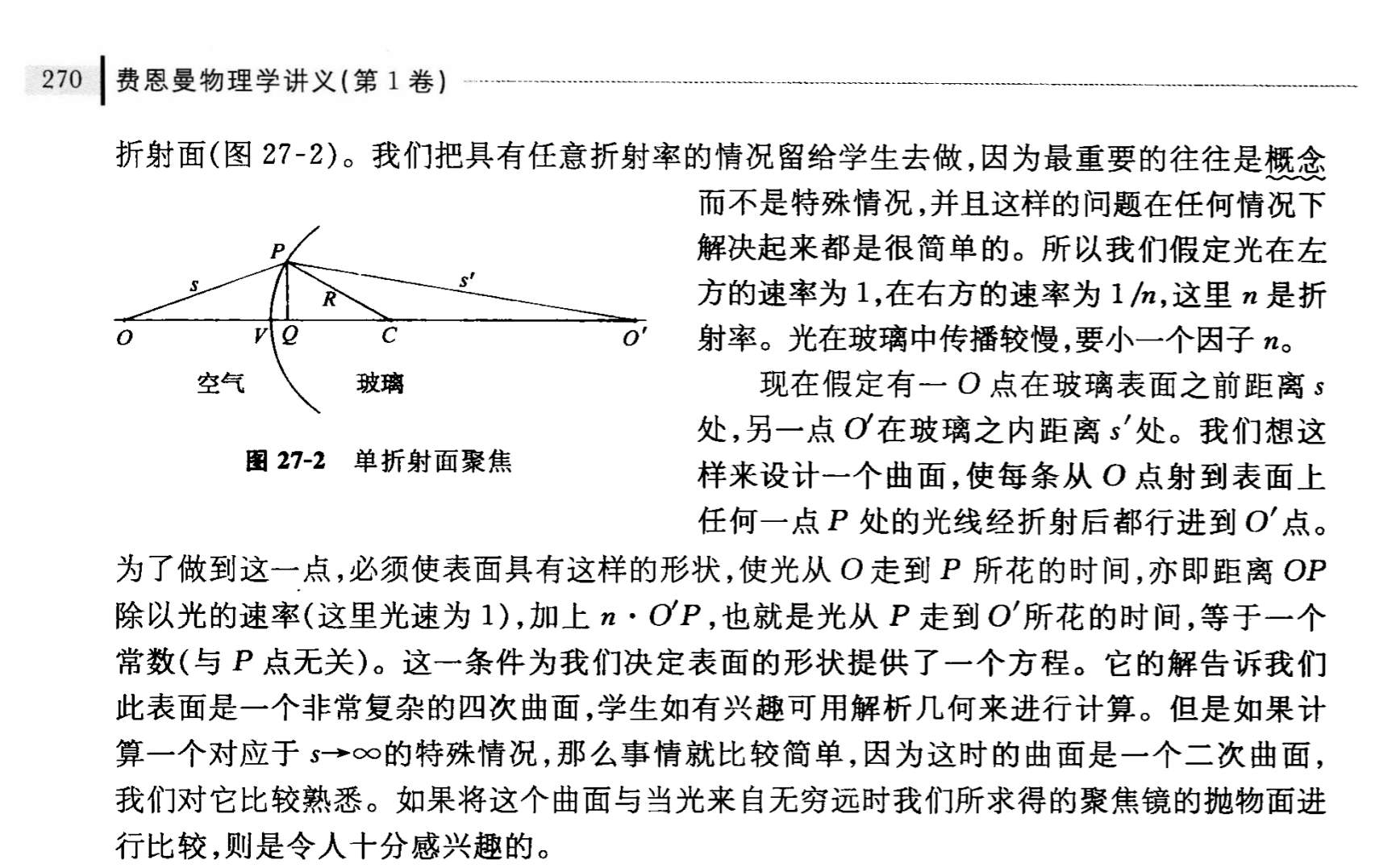
将所有光线都汇聚到特点焦点的曲面是难以制造的, 因此通常会放宽要求, 仅使得靠近轴线上的光线完全聚焦. 这些光线称为傍轴光线.
根据最短时间原理, 光线沿$OPO’$路径的耗时应该与$OQO’$的耗时相同. 设$PQ$长度为$h$, 则$OPO’$路径想相较于$OQO’$路径的额外耗时为
$$
\frac{h^2}{2s} + \frac{nh^2}{2s’}
$$
透镜通过向前弯曲(一个半径为R的球面), 使得光线在$OQO’$路径上多走一段玻璃来补偿上面的耗时, 多走的时间为
$$
\frac{nh^2}{2R} - \frac{h^2}{2R}
$$
两个时间相等, 因此有
$$
\frac{1}{s} + \frac{n}{s’} = \frac{n-1}{R}
$$
任意满足上述距离要求的点都可以被该透镜聚焦, 而且当其中一个点趋于无穷大时, 相当于平行入射的光线, 此时光线将汇聚到另外一点, 这一点到表面的距离称为焦距, 例如令$s$为无穷大, 则有
$$
f’ = \frac{Rn}{n-1}
$$
或者令$s’$为无穷大, 则有
$$
f = \frac{R}{n-1}
$$
由此可以发现焦距除以折射率是一个定值. 而此规律对任意透镜系统都是成立的
通常测量焦距比测量球面半径要更容易, 因此在透镜的使用中也更常使用焦距.
像差与色差
由于光学系统无法完美的汇聚光线, 因此会产生像差. 例如球面透镜只能将傍轴光线汇聚到焦点, 而偏离轴线的光线无法完美汇聚. 不过通过多个透镜组合, 可以使像差相互抵消, 从而纠正.
此外不同颜色的光在玻璃中具有不同的速率或者折射率, 因此将一种颜色聚焦时就无法让另一种颜色完美聚集, 这种性质称为色差.
因此折射望远镜存在色差问题, 但牛顿发明的反射望远镜不涉及折射因此没有色差问题
关于成像的极限情况是: 距离轴最远的光线与中心光线之间的之间差小于光的一次振动的周期. 此时在进行改进对于成像已经没有收益.
电磁辐射
对于电场的基本公式是库仑定律, 但那只是针对静电场的情况, 在考虑了电荷的运动情况后, 实际的公式为
$$
E = - \frac{1}{4 \pi \epsilon_0}[ \frac{e_r’}{r’^2} + \frac{r’}{c} \frac{\mathrm{d}}{\mathrm{d}t}(\frac{e_{r’}}{r’^2}) + \frac{1}{c^2}\frac{\mathrm{d}^2 e_{r’}}{\mathrm{d}t^2}]
$$
已经被吓哭了, 电动力学恐怖如斯
由于电荷只能以光速$c$传播电场, 因此对于一个测量点$P$, 它实际收到的作用是电荷在过去的行为. 假设这个过去的时刻为$t’$, 则有
$$
t’ = t - \frac{r’}{c}
$$
其中有撇的是延迟时间和延迟距离, 表示在过去的某个时间和距离. 没有撇的是当前的时间和距离. 上面的公式实际上是相互依赖的, 因此相当于给出了一个约束条件, 要根据$r$的具体表达式进行求解.
从电场的表达式来看, 整体可以分为三项. 其中第一项就是原本的库伦定律. 第二项是考虑到电荷的速度后的修正项. 可以看到前两项均与距离的平方反比.
第三项是电荷的加速度项, 其二阶导数经过推导可以发现与距离的一次方反比. 因此对于一个远距离的电荷, 其前两项将快速衰减, 仅剩下第三项成为主导.
注意到这里是二阶导数, 因此如果电荷沿着径向移动, 那么这个向量只会有大小变化而不会有方向变化, 那么二阶导数就是零. 因此径向运动的电荷就不会产生这个修正项. 只有垂直于径向的方向运动才会有第三项的修正.
这里的径向是只在极坐标或者柱坐标下, 极轴的方向
假设电荷在足够远的地方在垂直方向进行了微小的位移, 此时可以假设实际时间和延迟时间的差别非常小, 角位移(角度的变化量)就等于$x/r$(tan函数的近似), 由于径向几乎不变, 因此有
$$
\frac{\mathrm{d}^2 e_{r’}}{\mathrm{d}t^2} = \frac{\mathrm{d}^2 x/r}{\mathrm{d}t^2} = \frac{1}{r} \frac{\mathrm{d}^2 x}{\mathrm{d}t^2} = \frac{1}{r}a(t)
$$
全部带入则有
$$
E_x(t) = - \frac{q}{4 \pi \epsilon_0 c^2 r}a_x(t - \frac{r}{c})
$$
注意: $E$是关于时间的函数, $a_x$也是关于时间的函数, 后面的括号是自变量, 不是乘法
从公式也可以看到, 电场的表达式确实是与距离的一次方成反比, 因此由于电荷加速度产生的电场可以传播更远的距离.
基于以上表达式可以设想一个场景, 如果时间增加一个小量$\Delta t$, 那么只要距离增加一个小量$\Delta r = c\Delta t$, 那么就可以让上面的表达式恢复到原来的值. 可以想象增加时间就相当于增加距离, 那么场就类似波一样向外传播.
辐射能量
辐射的能量认为与场的平方成正比. 考虑使用一个探测的例子受到上述电场的作用, 那么可以推导其增加的动能与场的平方正比. 同时由于能量守恒, 可以认为能量与距离的平方反比
最后更新: 2026年07月30日 15:33
版权声明:本文为原创文章,转载请注明出处